Just in time for the weekend all the parts for version 2 of my Clamps badge arrived!
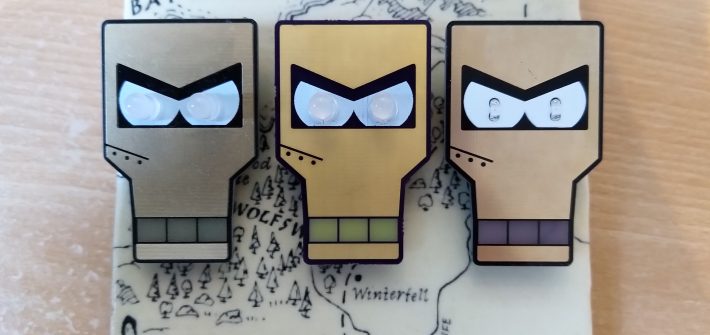
Here’s a look at the bare PCB from OSHPark – annoyingly I had issues with the front ENIG finish on two of the badges, and the front soldermask on all three to varying degrees. OSHPark have sent some replacements off for fabrication but I decided to press ahead with the best of the bunch.
(more…)