
Here’s a plugin I’ve been working on this weekend that integrates Google Music with the Google AIY Voice Kit. Simply speaking, “play playlist” will stream the playlist from your Google Music account and display the current track artist & title on the display.
Author: Tom
Google Voice Kit Case
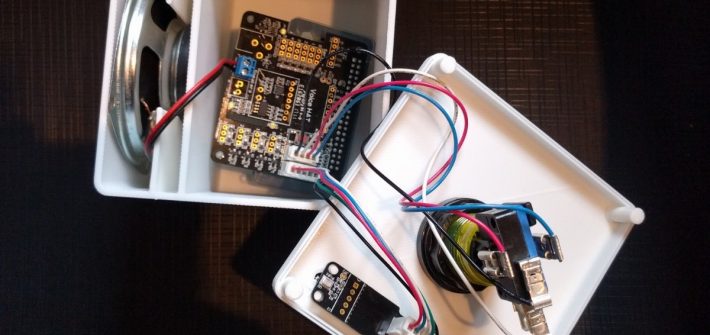
So Google recently released their first AIY project on the cover of the MagPi magazine. The kit itself allows you to add voice interaction to your Raspberry Pi and in typical Google fashion it came with a cardboard case to keep all the bits in. Well that was the plan, but unfortunately my kit didn’t come with the case. Nevermind, I have access to a 3D printer! (more…)
Optical Odometry (Part 2)
This is the second part of a series investigating the use of optical sensors for robot odometry.
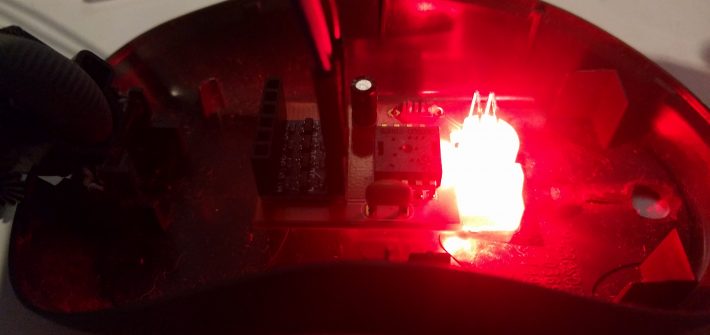
In part one of this project I pulled apart an old Microsoft Intellimouse for the optical chip and managed to extract some readings using an Arduino Uno. The aim now is to repackage those components in a way that they could be mounted underneath a small wheeled robot. (more…)
Optical Odometry (Part 1)
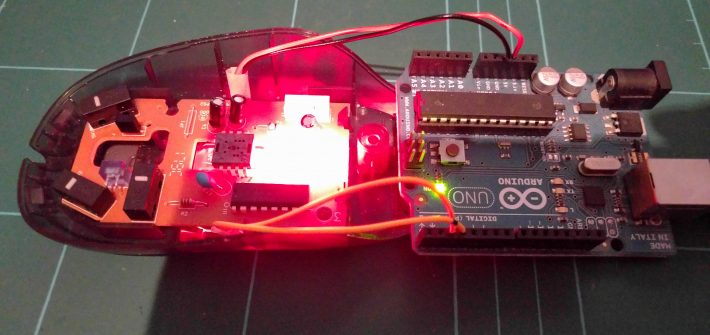
For the last few years I’ve taken part in the local Rampaging Chariots competition along with a group of graduates. One of our most recent challenges has been to get a rover to autonomously navigate the assigned assault course. So lately I’ve been thinking a lot about odometry, that is, estimating the position of a robot over time. Typically, a cheap method of tracking the position of a rover is by attaching rotary encoders to the output shaft of the drive wheels. Unfortunately as the traction of the drive wheels isn’t perfect, they will slip occasionally and introduce errors into the estimated position.
LED Matrix 2.0 Update
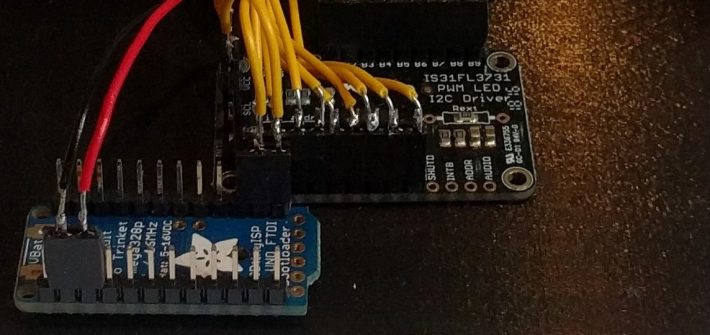
So I finally decided on an Adafruit Pro Trinket to replace the Arduino Uno hanging off the back of my new LED Matrix.
Raspberry Pi Face Tracker
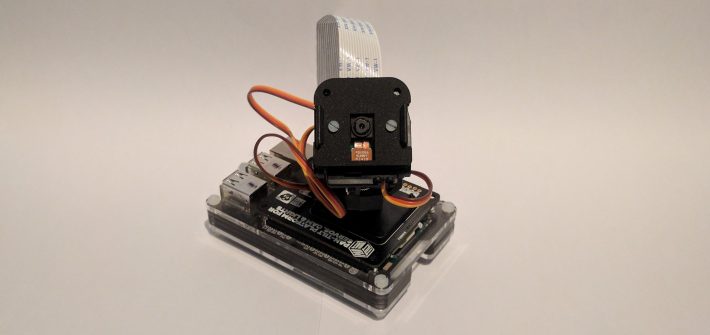
Having recently bought a Pimoroni Pan-Tilt HAT – I thought I’d put it to good use as a face tracker! I started off with the code example from the Pimoroni github, but thought I’d tweak it a little so that if it can’t find a face it starts searching. (more…)
- 3D Printing
- ...
LED Matrix 2.0
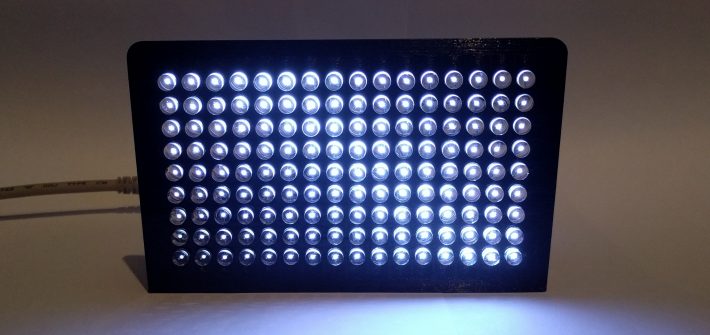
We can rebuild him; we have the technology.
So a few posts ago I hinted that I was thinking about rebuilding my old hand-soldered LED matrix using 3D printing to assist me, here’s a log of that build!
Raspberry Pi Audio Visualiser

Another Unicorn HAT project that I’ve been fiddling around with for a while. I was looking for a way to introduce kids to the idea of Fast Fourier Transforms (FFTs) and signal processing so with my love of blinking lights I thought I’d create an audio visualiser just like the one you tend to find in media-players.
LED Matrix

This post is a sort of eulogy. About 5 years ago I decided to teach myself a little more about electronics and thought building an LED matrix from scratch would be a good idea. Not just any old LED matrix, a 16×8 LED matrix. That’s 128 individual LEDs along with a whole bunch of resistors, transistors and a couple of shift registers for good measure.
Word Clock

After getting my first Pi Zero I started thinking about a project to embed it in. I’d seen word clocks done in various ways, but thought I’d put my own spin on it. (more…)