These next two prints were a little less ambitious than the Unicorn HAT diffuser. Needing a little platform to experiment with robotics I bought a STS-Pi kit with the intention of mounting a Raspberry Pi Zero (with Explorer pHAT) on it to make a teeny rover. I didn’t realise until I received it, that it’s designed to bolt a full size Raspberry Pi directly to the chassis and while you can mount a Pi Zero, you’d need extra bolts to mount one in it’s case. Not wanting to ditch a case (or buy any extra bolts), I set about designing something to fix the problem.
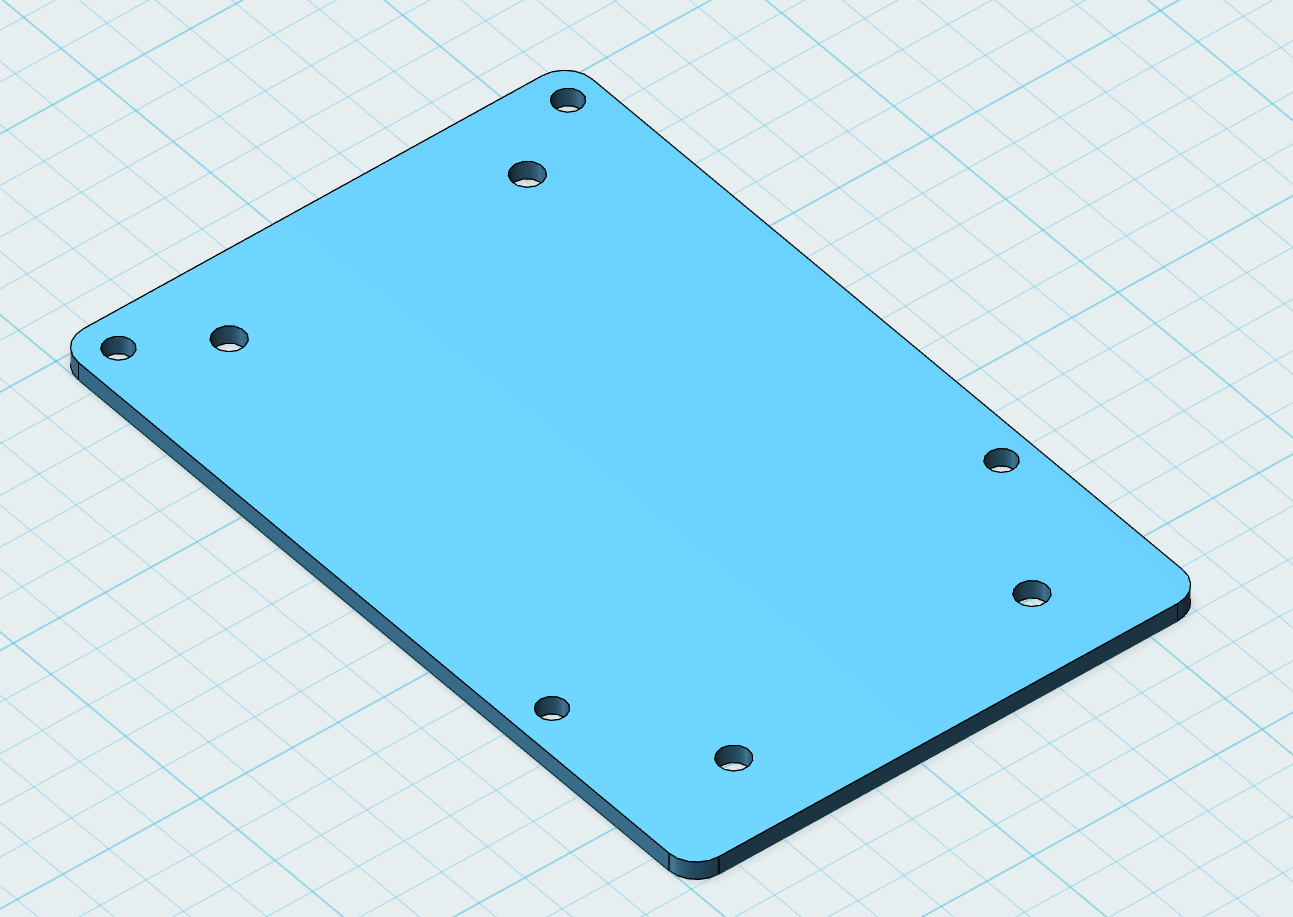
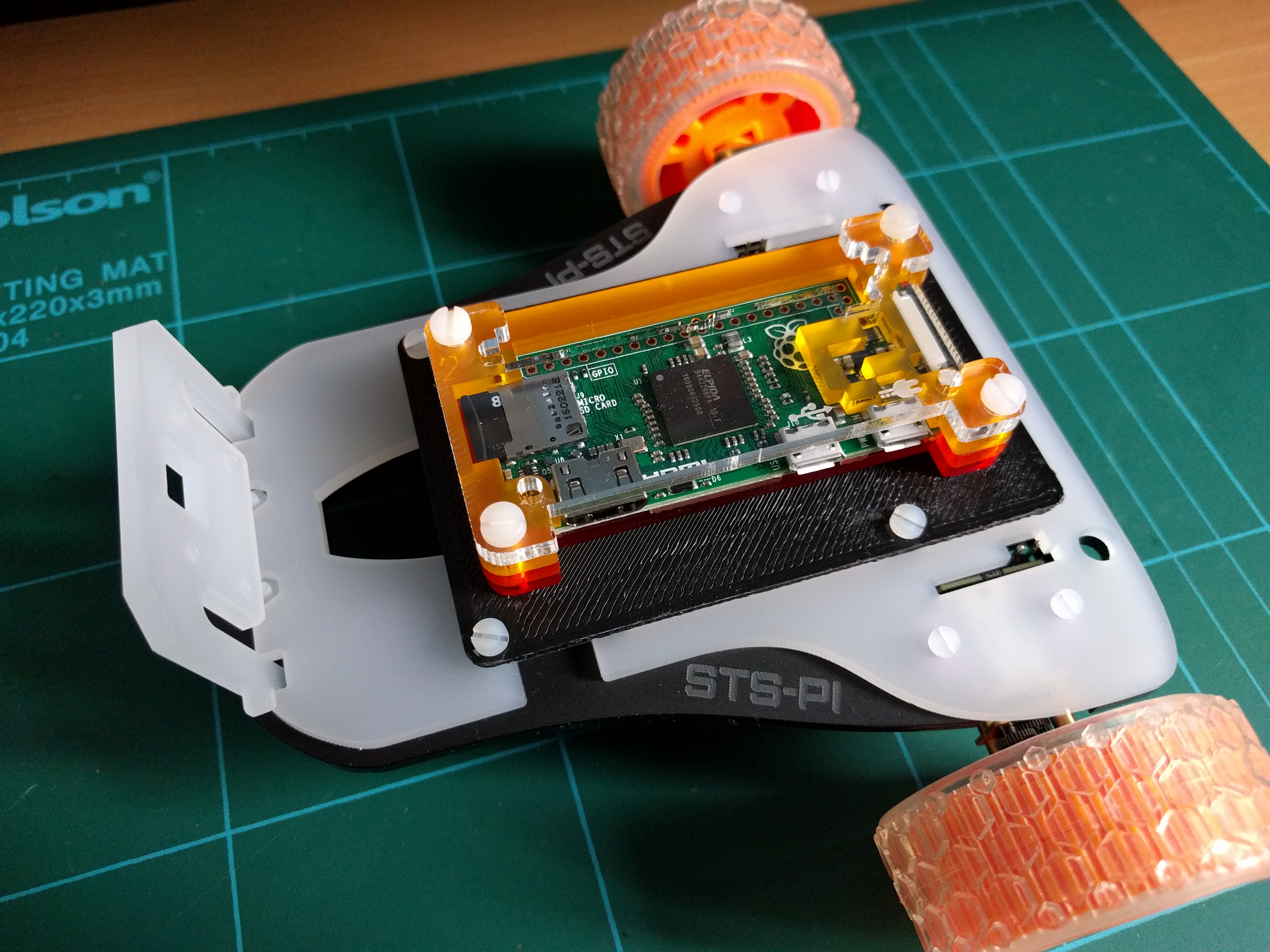
Having dug up the mechanical specifications for the Raspberry Pi to determine the locations of the outer mounting holes, I again grabbed the digital calipers to measure the position of the existing bolts in the Pi Zero case. The idea being that I’d bolt the shim layer to the chassis in place of the full size Pi and then bolt the Zero to the shim using the existing case bolts. Here it is printed and assembled.

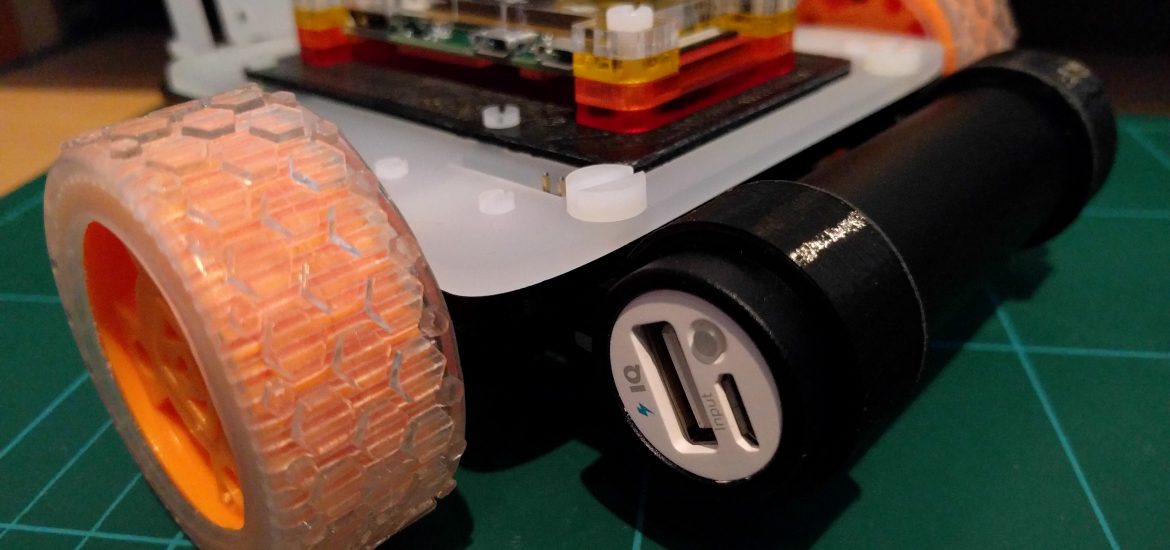
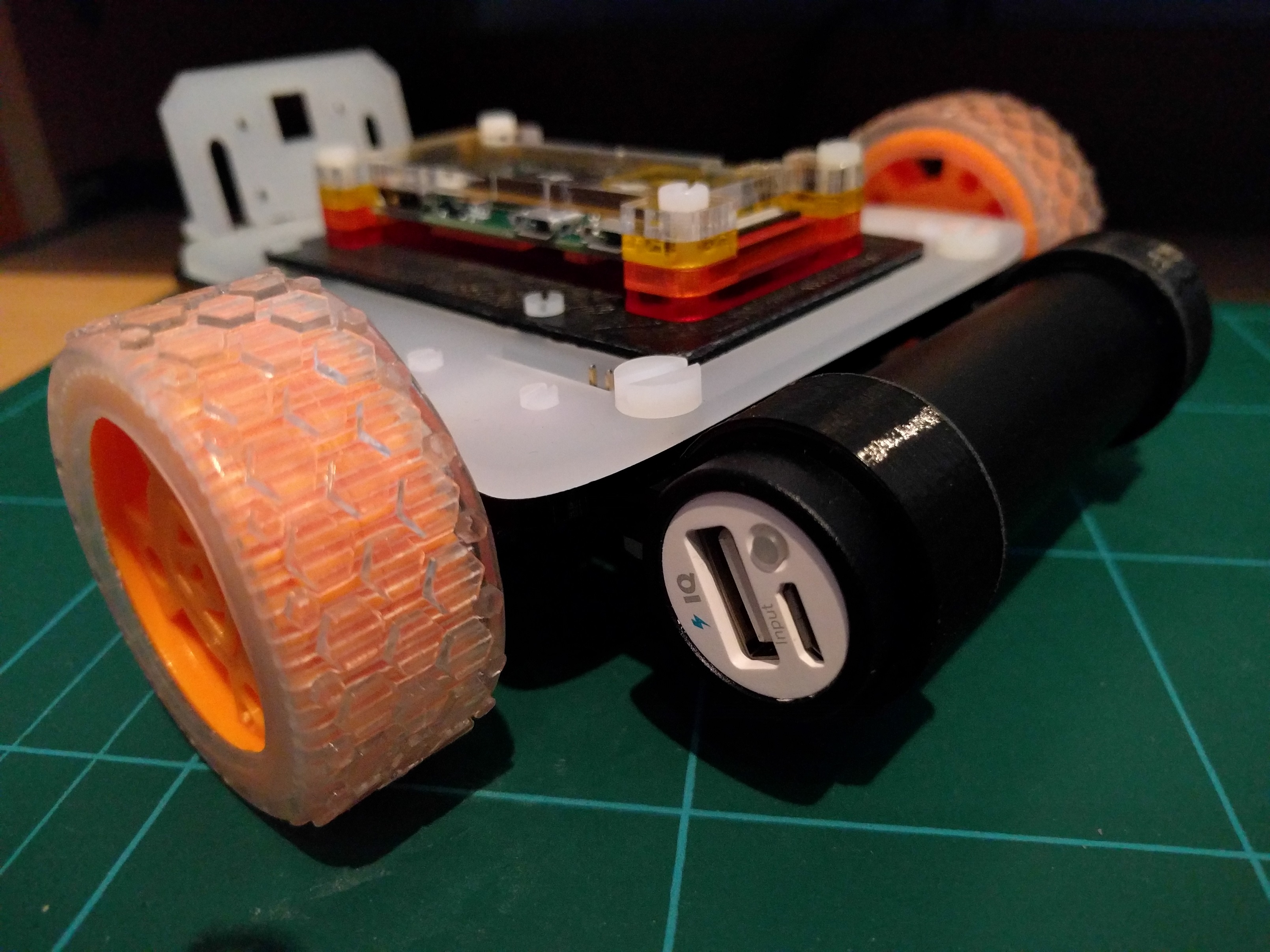
I think the orange case looks great with the wheels!
Along with the STS-Pi I bought a small cylindrical power bank to mount on the back of the rover. Unfortunately the battery pack I bought was too big for the provided clips, so back to the 3D printer.
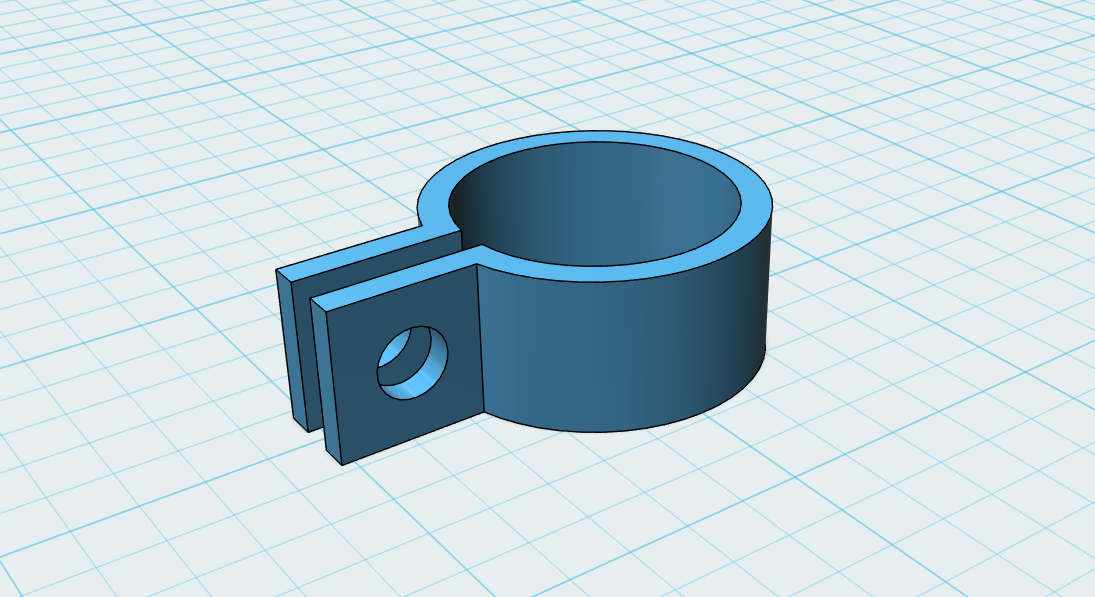
This was a pretty straight forward design with the internal diameter designed to be marginally larger than the battery pack. I could then use tension in the bolt to clamp down on the battery pack. I printed two of these off and attached them to the rover.
{kind=link}
Now just to get the thing moving. More on that later.