This is the second part of a series investigating the use of optical sensors for robot odometry.
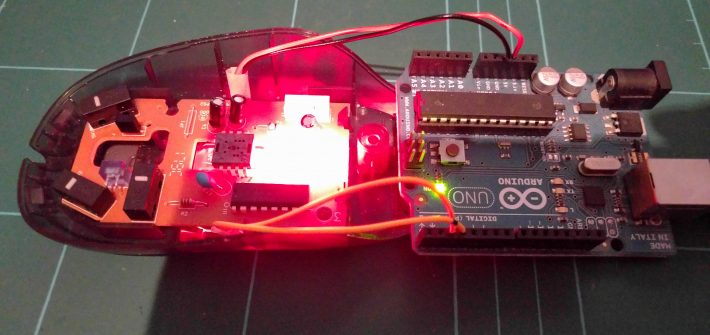
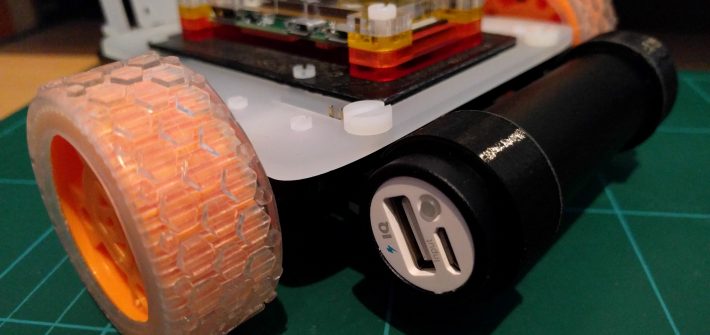
In part one of this project I pulled apart an old Microsoft Intellimouse for the optical chip and managed to extract some readings using an Arduino Uno. The aim now is to repackage those components in a way that they could be mounted underneath a small wheeled robot. (more…)

{kind=link}